
Εγκαταστάσεις Κινούμενου Δορυφορικού Κατόπτρου
Δύο είναι οι συνηθέστεροι τρόποι κίνησης ενός δορυφορικού κατόπτρου στο γεωστατικό τόξο: με χρήση βάσης polar mount με μοτέρ (actuator), ή με χρήση εντολών DiSEqC.

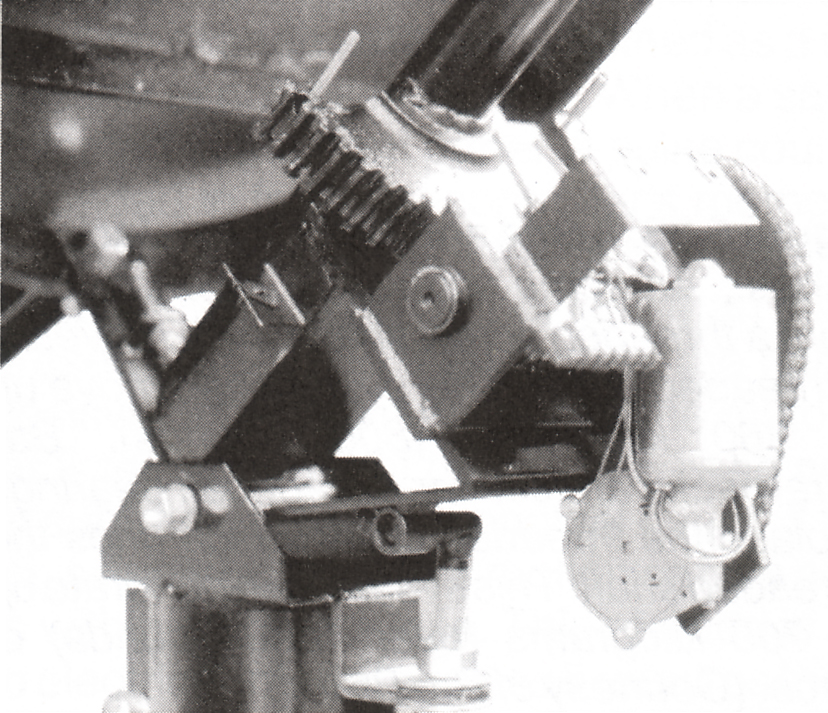
Ο πρώτος -και παλαιότερος- προϋποθέτει την χρήση βάσης σχεδιασμένης για να συνδεθεί με μοτέρ (βάση polar mount) και χρήση 4 επιπλέον καλωδίων που συνδέονται στο μοτέρ. Μια εγκατάσταση με χρήση βάσης polar mount με μοτέρ (actuator) είναι πολύπλοκη και χρονοβόρα αλλά η μόνη που μπορεί να χρησιμοποιηθεί σε κάτοπτρα πάνω από 140 cm. Για αυτό τον τρόπο διαβάστε στο σχετικό άρθρο.

Ο δεύτερος τρόπος μπορεί να εφαρμοστεί σε μια υπάρχουσα εγκατάσταση σταθερού κατόπτρου, χωρίς να χρειαστούν επιπλέον καλώδια, αφού σε αυτή την περίπτωση ένα κατάλληλα σχεδιασμένο μοτέρ κάνει χρήση εντολών DiSEqC μέσω του υπάρχοντος καλωδίου λήψης. Στον δεύτερο τρόπο ωστόσο υπάρχει περιορισμός στο μέγεθος του κατόπτρου (έως 140 cm για κάτοπτρο αλουμινίου και έως 120 cm για σιδερένιο κάτοπτρο). Για αυτό τον τρόπο διαβάστε στα σχετικά άρθρα: "Κινούμενη δορυφορική κεραία με μοτέρ τύπου DiSEqC 1.2" και "Κινούμενη δορυφορική κεραία με μοτέρ τύπου DiSEqC 1.2 / USALS".
 Σε ένα παραβολικό δορυφορικό κάτοπτρο εκτός από τους δύο προηγούμενους τρόπους υπάρχει επιπλέον δυνατότητα κίνησής του με χρήση actuator Horizon to Horizon που μπορεί να καλύψει όλο το οπτικό γεωστατικό τόξο μιας περιοχής αλλά έχει μεγάλο κόστος.
Σε ένα παραβολικό δορυφορικό κάτοπτρο εκτός από τους δύο προηγούμενους τρόπους υπάρχει επιπλέον δυνατότητα κίνησής του με χρήση actuator Horizon to Horizon που μπορεί να καλύψει όλο το οπτικό γεωστατικό τόξο μιας περιοχής αλλά έχει μεγάλο κόστος.
Πολύ σημαντικό είναι, σε όλες περιπτώσεις η βάση στήριξης του δορυφορικού κατόπτρου να είναι απολύτως κατακόρυφη γιατί σε διαφορετική περίπτωση, δεν πρόκειται το κάτοπτρο να κινηθεί στο γεωστατικό τόξο που είναι και το ζητούμενο. Όλη η δυσκολία στην εγκατάσταση ενός κινητού συστήματος δορυφορικής λήψης είναι στην ουσία η ρύθμιση της βάσης του έτσι ώστε αυτή κινούμενη, το τόξο λήψης του κατόπτρου να συμπίπτει ακριβώς πάνω στο γεωστατικό τόξο.
Στην Ελλάδα, που τα δορυφορικά κάτοπτρα συνήθως έχουν διαστάσεις μικρότερες από 120 cm, το μεγαλύτερο ποσοστό κινητών συστημάτων υλοποιείται με χρήση μοτέρ DiSEqC.
- Πληροφοριακά Στοιχεία

Ο παλαιότερος τρόπος εγκατάστασης συστήματος κινητού κατόπτρου προϋποθέτει την χρήση βάσης σχεδιασμένης για να συνδεθεί με μοτέρ (βάση polar mount) και χρήση 4 επιπλέον καλωδίων που συνδέονται στο μοτέρ εκτός από το ομοαξονικό καλώδιο. Μια εγκατάσταση με χρήση βάσης polar mount με μοτέρ (actuator) είναι πολύπλοκη και χρονοβόρα αλλά η μόνη που μπορεί να χρησιμοποιηθεί σε κάτοπτρα πάνω από 140 cm.
Διαβάστε περισσότερα: Κινούμενη Δορυφορική Κεραία με Βάση Polar Mount και Μοτέρ (Actuator)
- Πληροφοριακά Στοιχεία

Ο μόνος περιορισμός που υπάρχει αν επιλέξουμε κίνηση μιας δορυφορικής κεραίας με μοτέρ τύπου DiSEqC 1.2 είναι το μέγεθος του κατόπτρου, το οποίο δεν μπορεί να ξεπερνά τα 140 cm διάμετρο για κάτοπτρα αλουμινίου, ή τα 120 cm για σιδερένια κάτοπτρα. Έως εκεί μπορεί να αντεπεξέλθει n δύναμη ενός μοτέρ κίνησης DiSEqC 1.2 λόγω βάρους του κατόπτρου. Εννοείται πως ο δορυφορικός δέκτης που θα χρησιμοποιήσουμε στην εγκατάσταση θα υποστηρίζει το πρωτόκολλο DiSEqC 1.2.
Διαβάστε περισσότερα: Κινούμενη Δορυφορική Κεραία με Μοτέρ Τύπου DiSEqC 1.2
- Πληροφοριακά Στοιχεία
Σε περίπτωση που ο δορυφορικός δέκτης διαθέτει έκτος από το πρωτόκολλο DiSEqC 1.2 και το σύστημα USALS μπορούμε να επιλέξουμε μοτέρ με αυτό το σύστημα. Το συγκεκριμένο μοτέρ διαθέτει προρυθμισμένους στην μνήμη του δορυφόρους, πράγμα που κάνει πιο απλή την αρχική διαδικασία ανεύρεσης δορυφόρων από τον δορυφορικό δέκτη.
Διαβάστε περισσότερα: Κινούμενη Δορυφορική Κεραία με Μοτέρ Τύπου DiSEqC 1.2 / USALS